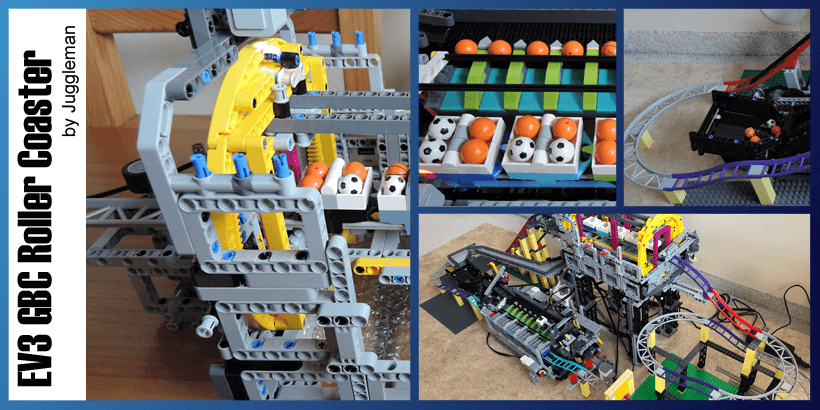
If you are an enthousiastic fan of Roller Coasters and of LEGO bricks, you’ll love EV3 GBC Roller Coaster module from the Czech builder Tomas Ullrich, aka Juggleman. This giant GBC module is controlled by an EV3 device and pilots two trains through a thrilling ride. Like in a real Rollercoaster, the wagoons from each train are carried to the top of the first rise via a mechanical chain. Then, once your favorite basket and soccer balls are unloaded thanks to an Akiyuki-inspired rotating platform, the train is released full speed onto the sliding ramp. youhou !
| Original design by: juggleman | Number of parts: 4300 |
| Original Blog Article (Czech): here |
Complexity for building:  |
| Price for Building: €€€€, expensive |
No Building Instructions is (for the moment) available on Planet GBC for this GBC module.
If you have reproduced this module or simply want to share links where we can find such module, please contact us via the link HERE. We’ll include your links/videos/comments (of course, with full credit to the originator). Planet GBC community will for sure be graceful to benefit from your inputs !
Some more details, which are visible below the YouTube video:
LEGO Great Ball Contraption with a roller coaster track driven by EV3 Mindstorms:
– 4 EV3 sensors: 2x touch + 2x color
– 4 EV3 motors: 3x medium + 1x large
– 2 small power functions motors
The EV3 program runs in 2 threads:
– the loading station (lower)
– the unloading station (upper)
Each thread runs endlessly and is synchronised with the other thread via flags (variables).
Once the upper rotor finishes, it puts up the flag.
Once the balls are loaded, train has departed and the gate is closing again, that is a signal (flag) to the other thread to release the train from the upper station.
So the process goes like this:
(A) the lower thread:
(1) gate is closed – no ball can enter the train, touch sensor is lying on the tracks
(2) keep the train belt going, wait for touch sensor (on the tracks) to be hit by the train – this happens even if you start the program with the train in the lower station
(3) train hits touch sensor on the track
(4) move belt under the train a little bit back and then forward again – this positions the train perfectly
(5) stop the belt under the train = train stops = is in the right position
(6) wait for at least one ball in the second to last (last but one) position – colour sensor is checking it
(7) ball enters second to last position = colour sensor detects a ball
(8) wait for second touch sensor to be pressed = the moving belt with balls is in the furthest position from the train
(9) touch sensor is pressed – belt is in the furthest position from the train
(10) open the gate
(11) wait 4 seconds until the gate is opened and touch sensors from the tracks is elevated
(12) wait for a flag signal from the upper station
(13) signal from the upper station received
(14) release the train = belt under the train starts moving; when the last car is still on the belt, increase belt speed to over come the small tracks hill
(15) wait for the moving belt with balls to be again in the furthest position = second touch sensor must be pressed
(16) moving belt is in the furthest position = second touch sensor is pressed
(17) start closing the gate and send a signal to the upper station to release the train = touch sensor lands back on the tracks
(18) loop to the start
(B) the upper thread:
There are 2 gates: one on the left and one on the right. The right one is not really needed and is in sync with the left one – they are attached to the same EV3 motor. If left gate closes, right gate opens and vice versa.
(1) left gate is opened, right gate is closed, train is empty in the rotor
(2) wait for signal from the lower station
(3) signal from the lower station received
(4) release the train = close left gate very quickly (full speed)
(5) train leaves upper station, is mainly dragged by gravity out of the station
(6) wait a moment for the train to depart
(7) open the left gate for a new train = close right gate = also quickly at full speed
(8) wait a few seconds (approx. 9) for the next train to be almost inside the upper rotor
(9) very very slowly close the left gate
(10) this will position the train inside the rotor
(11) close the right gate very very slowly = opens the left gate
(12) start the rotor = balls are unloaded
(13) wait 1 seconds for the rotor to miss the mark for the second color sensor (explained next)
(14) wait for second colour sensor to hit the mark on the rotor
(15) color sensor hits the mark = tracks are in perfect position = aligned
(16) stop the rotation
(17) loop to the start
Key thing: gates are created via Akiyuki’s GBC Container Transporter = 6 baskets swapping: if you hit the final position and if the motor should be stopped, it can continue and the gate will not be moved and no gear will be destroyed/stuck. Check Akiyuki’s instructions at planet GBC.
The non EV3 motors have the following functions:
One is simply taking the train up the hill.
Second does the following:
– grab balls from the starting container and move them to the ball belt in the lower station
– move ball belt = distribute balls further to the last car
– move the whole belt closer and further from the train = a tilt move = this makes sure, that always 2 balls are stuck in front of the train and the rest of the balls goes in further positions
The speed of belt and speed of the tilt movement (closer/further) was very carefully picked.